Funcionamiento de un sensor HC-SR04
Cómo funciona un sensor y un código ejemplo para conectarlo a la placa Arduino.
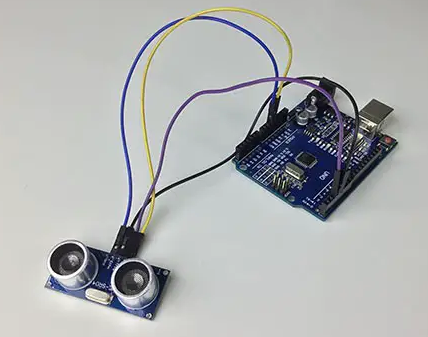
Ejemplo de un sensor conectado a una placa de Arduino
Los sensores usados en proyectos de electrónica suelen ser sensores de distancia de baja precisión basados en ultrasonidos. Se usan en proyectos como detección de obstáculos y sensores de presencia.
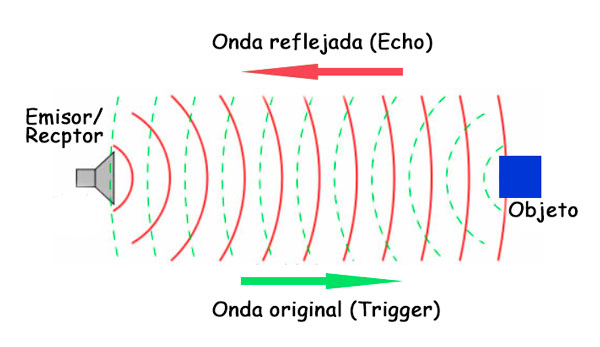
Su funcionamiento es muy simple: El emisor emite ondas que rebotan con el objeto y son captados por el receptor. La distancia se calcula gracias al tiempo que transcurre entre la emisión de la señal y la captación de esta por el receptor.
Sabemos que la velocidad se puede calcular cómo:
Velocidad = Superficie / Tiempo
Si la velocidad del sonido es 343 m/s a una temperatura de 20ºC y con una humedad del 50%.
343 (m/s) • 100 (cm/m) • 1/1e-6 (s/µs) = 0.0343 cm/µs
Es decir, el sonido 0.0343 cm por cada microsegundo. Por lo que podemos obtener la distancia existente de un objeto a partir del tiempo que transcurre entre la emisión de la señal y su recepción.
Distancia del objeto = (Velocidad • Tiempo)/2
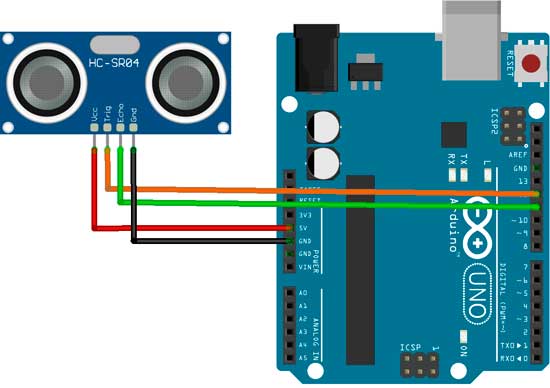
Ahora vamos a poner un ejemplo de un posible código en Arduino para controlar un sensor HC-SR04:
Esperamos que os haya servido de ayuda en vuestros proyectos.